North Carolina Eyalet Üniversitesi'nde geliştirilen robotlara Butterfly Bot (Kelebek Robotlar) adı veriliyor. Çünkü, bu robotların yüzme hareketleri, kelebeklerin kanat çırpma hareketine benziyor.
Makale yazarı ve NC State'de makine ve uzay mühendisliği doçenti Jie Yin, Butterfly Bot'u, "Bugüne kadar, yumuşak yüzen robotlar saniyede bir vücut uzunluğundan daha hızlı yüzemediler, ancak manta vatozları gibi deniz hayvanları çok daha hızlı ve çok daha verimli yüzebiliyor" olarak açıkladı.
"Daha hızlı ve enerji açısından daha verimli yumuşak robotlar geliştirip geliştiremeyeceğimizi görmek için bu hayvanların biyomekaniğinden yararlanmak istedik. Geliştirdiğimiz prototipler son derece iyi çalışıyor.”
Hız ve manevra için iki farklı robot geliştirildi
Araştırmacılar tarafından iki tür kelebek bot geliştirildi. Biri hız için özel olarak tasarlandı ve saniyede 3,74 vücut uzunluğu ortalama hıza ulaşabildi. Diğer bot ise sağa veya sola keskin dönüşler yapabilen, yüksek manevra kabiliyetine sahip olacak şekilde tasarlandı. Bu manevra kabiliyetine sahip prototip, saniyede 1,7 gövde uzunluğundaki hızlara ulaşabiliyordu.
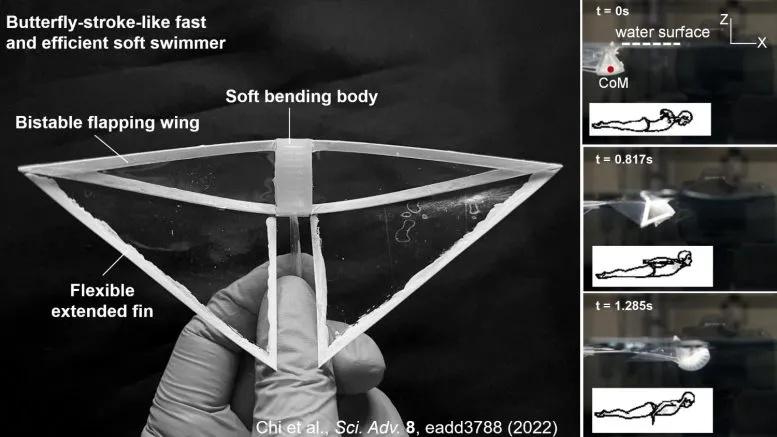
Kelebek botlar, yüzme güçlerini "iki durumlu" olan kanatlarından alırlar, yani kanatların iki sabit durumu vardır. Bu kanatlar, çıtçıt saç tokasına benzer. Bir saç tokası, siz belirli bir miktarda enerji uygulayana kadar sabittir. Enerji miktarı kritik noktaya ulaştığında, saç tokası farklı bir şekle girer ve hareket eder.
Kelebek botlarda, saç tokasından ilham alan iki durumlu kanatlar yumuşak, silikon bir gövdeye takılır. Yumuşak gövde içindeki haznelere hava pompalayarak kanatlardaki iki kararlı durum arasındaki geçişi kontrol eder. Bu hazneler şişip söndükçe, vücut yukarı ve aşağı eğilir ve kanatları ileri geri hareket etmeye zorlar.

Jie Yin, "Çırpma yapan robotlar geliştirmeye yönelik önceki girişimlerin çoğu, doğrudan kanatlara güç sağlamak için motorları kullanmaya odaklanmıştı" diyor."
Kablosuz bir sürüş için robotlar geliştirilmeye devam edilecek
Yaklaşımımız, merkezi gövdeyi hareket ettirerek pasif olarak çalıştırılan iki durumlu kanatlar kullanıyor. Bu önemli bir ayrım çünkü ağırlığı azaltan basitleştirilmiş bir tasarıma kullanmaya izin veriyor.”
"Bu çalışma, konseptin heyecan verici bir kanıtı, ancak sınırlamaları var. En açık şekilde, mevcut prototipler, merkezi gövdelere hava pompalamak için kullandığımız ince borularla bağlanıyor. Şu anda bağlantısız, otonom bir sürüm geliştirmek için yeni projeler üzerinde çalışıyoruz."
Haberimize konu olan bu makale Science Advances dergisinde yayınlandı.